Zakres wykładów MASZYNY TECHNOLOGICZNE i ROBOTY
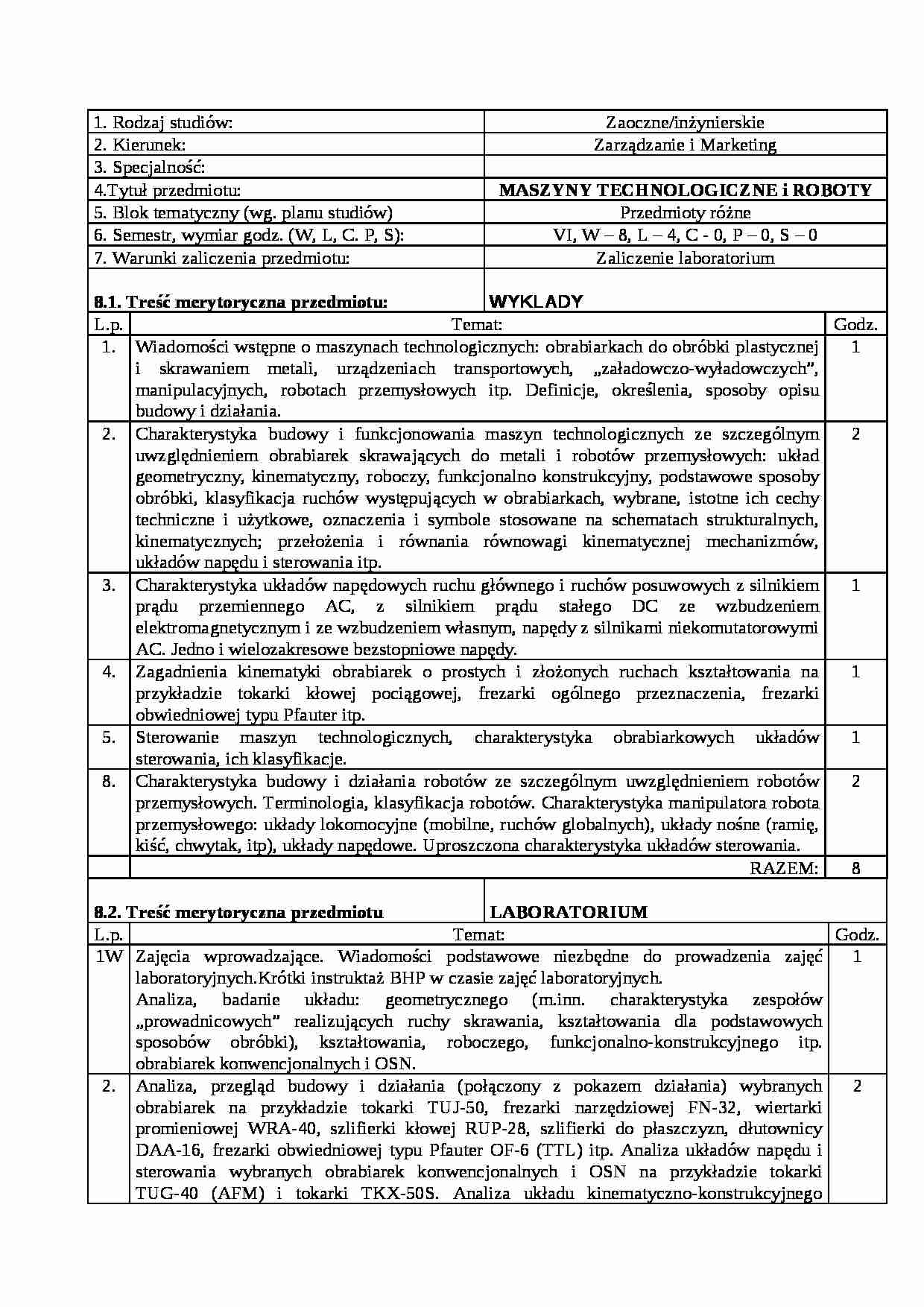
1. Rodzaj studiów: Zaoczne/inżynierskie 2. Kierunek: Zarządzanie i Marketing 3. Specjalność: 4.Tytuł przedmiotu: MASZYNY TECHNOLOGICZNE i ROBOTY 5. Blok tematyczny (wg. planu studiów) Przedmioty różne 6. Semestr, wymiar godz. (W, L, C. P, VI, W – 8, L – 4, C - 0, P – 0, S – 0 S): 7. Warunki zaliczenia przedmiotu: Zaliczenie laboratorium 8.1. Treść merytoryczna przedmiotu: WYKLADY L.pTemat: Godz. . 1. Wiadomości wstępne o maszynach technologicznych: obrabiarkach do 1 obróbki plastycznej i skrawaniem metali, urządzeniach transportowych, „załadowczo-wyładowczych”, manipulacyjnych, robotach przemysłowych itp. Definicje, określenia, sposoby opisu budowy i działania. 2. Charakterystyka budowy i funkcjonowania maszyn technologicznych ze 2 szczególnym uwzględnieniem obrabiarek skrawających do metali i robotów przemysłowych: układ geometryczny, kinematyczny, roboczy, funkcjonalno konstrukcyjny, podstawowe sposoby obróbki, klasyfikacja ruchów występujących w obrabiarkach, wybrane, istotne ich cechy techniczne i użytkowe, oznaczenia i symbole stosowane na schematach strukturalnych, kinematycznych; przełożenia i równania równowagi kinematycznej mechanizmów, układów napędu i sterowania i
1. Rodzaj studiów:
Zaoczne/inżynierskie
2. Kierunek:
Zarządzanie i Marketing
3. Specjalność:
4.Tytuł przedmiotu:
MASZYNY TECHNOLOGICZNE i ROBOTY
5. Blok tematyczny (wg. planu studiów)
Przedmioty różne
6. Semestr, wymiar godz. (W, L, C. P, S):
VI, W - 8, L - 4, C - 0, P - 0, S - 0
7. Warunki zaliczenia przedmiotu:
Zaliczenie laboratorium
8.1. Treść merytoryczna przedmiotu:
WYKLADY
L.p.
Temat:
Godz.
1.
Wiadomości wstępne o maszynach technologicznych: obrabiarkach do obróbki plastycznej i skrawaniem metali, urządzeniach transportowych, „załadowczo-wyładowczych”, manipulacyjnych, robotach przemysłowych itp. Definicje, określenia, sposoby opisu budowy i działania.
1
2.
Charakterystyka budowy i funkcjonowania maszyn technologicznych ze szczególnym uwzględnieniem obrabiarek skrawających do metali i robotów przemysłowych: układ geometryczny, kinematyczny, roboczy, funkcjonalno konstrukcyjny, podstawowe sposoby obróbki, klasyfikacja ruchów występujących w obrabiarkach, wybrane, istotne ich cechy techniczne i użytkowe, oznaczenia i symbole stosowane na schematach strukturalnych, kinematycznych; przełożenia i równania równowagi kinematycznej mechanizmów, układów napędu i sterowania itp. 2
3.
Charakterystyka układów napędowych ruchu głównego i ruchów posuwowych z silnikiem prądu przemiennego AC, z silnikiem prądu stałego DC ze wzbudzeniem elektromagnetycznym i ze wzbudzeniem własnym, napędy z silnikami niekomutatorowymi AC. Jedno i wielozakresowe bezstopniowe napędy.
1
4.
Zagadnienia kinematyki obrabiarek o prostych i złożonych ruchach kształtowania na przykładzie tokarki kłowej pociągowej, frezarki ogólnego przeznaczenia, frezarki obwiedniowej typu Pfauter itp. 1
5.
Sterowanie maszyn technologicznych, charakterystyka obrabiarkowych układów sterowania, ich klasyfikacje. 1
8.
Charakterystyka budowy i działania robotów ze szczególnym uwzględnieniem robotów przemysłowych. Terminologia, klasyfikacja robotów. Charakterystyka manipulatora robota przemysłowego: układy lokomocyjne (mobilne, ruchów globalnych), układy nośne (ramię, kiść, chwytak, itp), układy napędowe. Uproszczona charakterystyka układów sterowania. 2
RAZEM:
8
8.2. Treść merytoryczna przedmiotu
LABORATORIUM
L.p.
Temat:
Godz.
1
(…)
…:
Literatura:
L. Gondek, J. Perdenia, J. Stachoń, K. Wazl - „Laboratorium obrabiarek”. Skrypt, Politechnika Krakowska, Kraków 1992.
J. Kosmol - „Automatyzacja obrabiarek i obróbki skrawaniem”. WNT, Warszawa 1995.
J.J. Kraig - „Wprowadzenie do robotyki” (Mechanizmy i sterowanie). WNT, Warszawa 1993 (Tłumaczenie z języka angielskiego J. Knapczyk).
A. Morecki, J. Knapczyk - „Podstawy robotyki”. (Teoria…
…), układy nośne (ramię, kiść, chwytak, itp), układy napędowe. Uproszczona charakterystyka układów sterowania. 2
RAZEM:
8
8.2. Treść merytoryczna przedmiotu
LABORATORIUM
L.p.
Temat:
Godz.
1W
Zajęcia wprowadzające. Wiadomości podstawowe niezbędne do prowadzenia zajęć laboratoryjnych.Krótki instruktaż BHP w czasie zajęć laboratoryjnych.
Analiza, badanie układu: geometrycznego (m.inn. charakterystyka zespołów…
... zobacz całą notatkę
Komentarze użytkowników (0)