To tylko jedna z 9 stron tej notatki. Zaloguj się aby zobaczyć ten dokument.
Zobacz
całą notatkę


Wykład 7
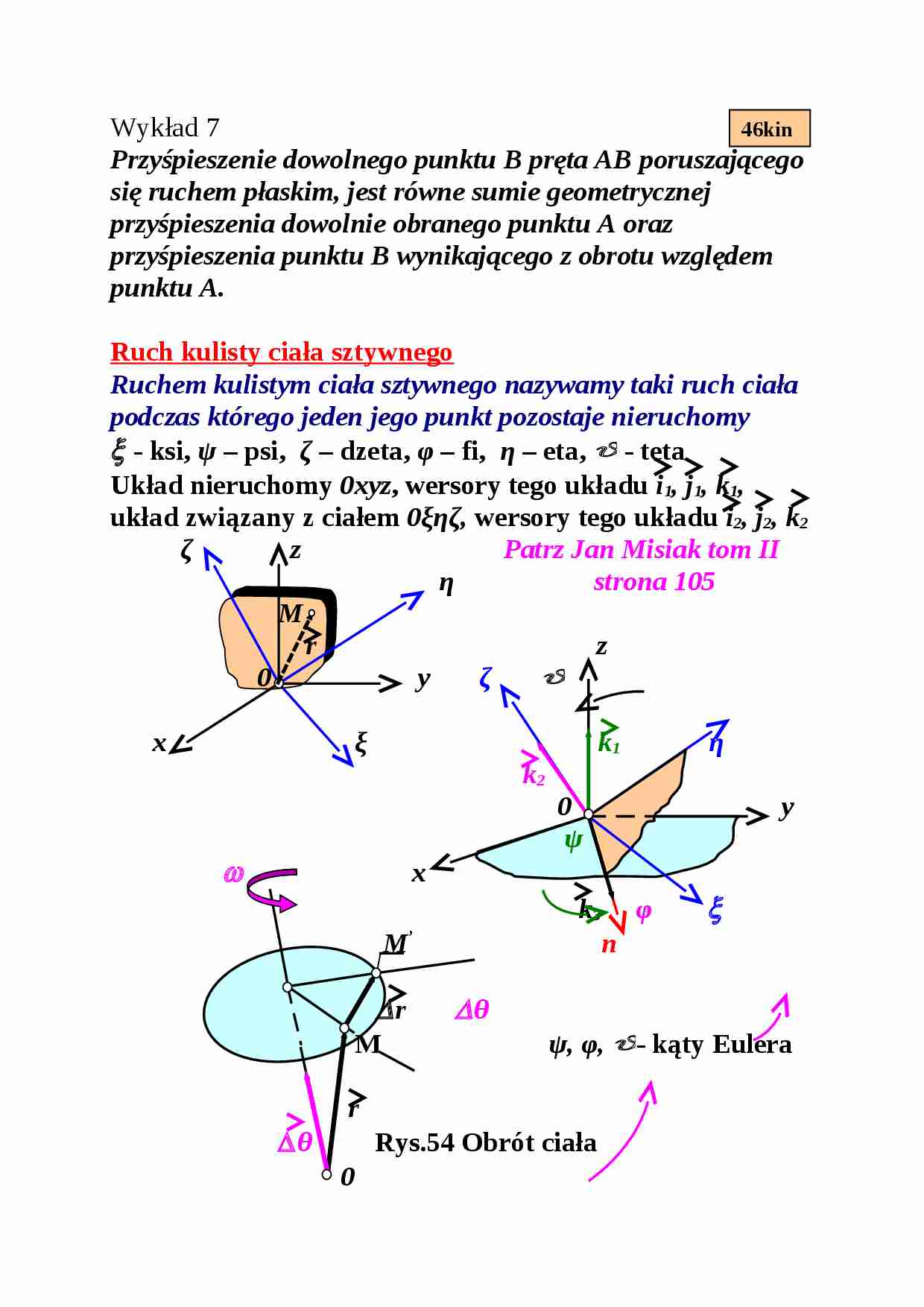
Przyśpieszenie dowolnego punktu B pręta AB poruszającego się ruchem płaskim, jest równe sumie geometrycznej przyśpieszenia dowolnie obranego punktu A oraz przyśpieszenia punktu B wynikającego z obrotu względem punktu A. Ruch kulisty ciała sztywn ego Ruchem kulistym ciała sztywnego nazywamy taki ruch ciała podczas którego jeden jego punkt pozostaje nieruchomy ξ - ksi, ψ - psi, ζ - dzeta, φ - fi, η - eta, - teta Układ nieruchomy 0xyz , wersory tego układu i 1 , j 1 , k 1 , układ związany z ciałem 0ξηζ, wersory tego układu i 2 , j 2 , k 2 ζ z Patrz Jan Misiak tom II η strona 105 M r z 0 y ζ x ξ k 1 η k 2 0 y ψ ω x k 3 φ ξ M ' n * r * θ M ψ, φ, - kąty Eulera r * θ Rys.54 Obrót ciała 0 Wektor wypadkowy małego obrotu * θ jest równy sumie geometrycznej wektorów małych obrotów wokół poszczególnych osi (70) Prędkości kątowe i liniowe w ruchu kulist ym Prędkość liniowa punktu M (rys.54)jest równa (71) gdzie ω - chwilowa prędkość kątowa ciała sztywnego (72) ω 1 -prędkość kątowa precesji , wektor ω 1 pokrywa się z 0z ω 2 - prędkość kątowa obrotu własnego, wektor ω 2 pokrywa się z osią układu ruchomego 0 ζ ω 3 - prędkość kątowa nutacji , wektor
(…)
… ω3cosϕ
ϕ
n ξ
Znając położenie chwilowej osi obrotu i składowe
prędkości kątowej ciała wokół tej osi, można wyznaczyć prędkość liniową dowolnego punktu M ciała
(75)
Wartość liczbowa tej prędkości wynosi
(76)
z M
V
h
l
0 y
z x
x y Rys.55
Składowe prędkości liniowej punktu M w:
nieruchomym układzie współrzędnych 0xyz są równe
, , ruchomym układzie współrzędnych wynoszą , , Przyśpieszenie kątowe i liniowe w ruchu kulistym
Różniczkując (72) otrzymujemy przyśpieszenie kątowe
(77)
gdzie Różniczkując (75) otrzymujemy wzór na przyśpieszenie liniowe punktu M
(78)
Chwilowe osie obrotu w układzie ruchomym tworzą pewną powierzchnię stożkową z wierzchołkiem w punkcie 0.
Aksoida ruchoma jest to miejsce geometryczne chwilowych osi obrotu w układzie ruchomym.
Aksoida nieruchoma jest to miejsce geometryczne chwilowych osi obrotu w układzie nieruchomym.
PRECESJA REGULARNA
Kąt precesji = const, stąd oraz ω1 = const, ω2 = const l0 z
ζ
υ
ω
ω1 η
ω2 0 y
x ψ ε ϕ ξ
n
Rys.56 Precesja regularna
Na podstawie wzoru (77) przyśpieszenie kątowe
(79)
Biorąc pod uwagę, że otrzymamy gdyż Wektor przyśpieszenia kątowego ε o przyjętym początku w środku ruchu kulistego 0 jest prostopadły do wektorów ω1 i ω2, a więc jest skierowany…
…)
Prędkości kątowe i liniowe w ruchu kulistym
Prędkość liniowa punktu M (rys.54)jest równa (71)
gdzie ω - chwilowa prędkość kątowa ciała sztywnego
(72)
ω1-prędkość kątowa precesji, wektor ω1 pokrywa się z 0z
ω2- prędkość kątowa obrotu własnego, wektor ω2 pokrywa
się z osią układu ruchomego 0 ζ
ω3- prędkość kątowa nutacji, wektor ω3 leży na linii węzłów
0n (rys.54)
Składowe wektora prędkości kątowej ω :
(73…
... zobacz całą notatkę
Komentarze użytkowników (0)