To tylko jedna z 2 stron tej notatki. Zaloguj się aby zobaczyć ten dokument.
Zobacz
całą notatkę

Krzysztof Koz_owski. Notatka składa się z 2 stron.
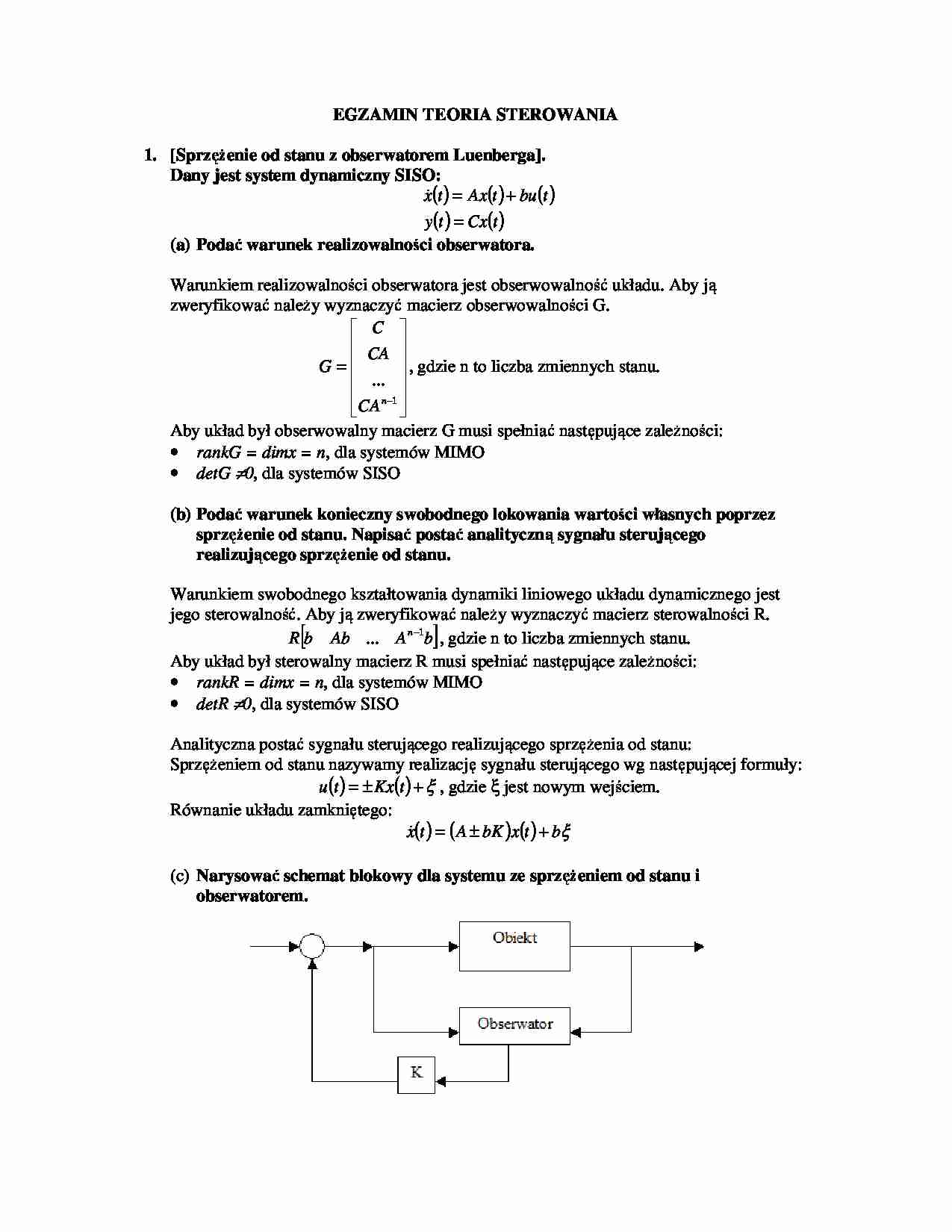
EGZAMIN TEORIA STEROWANIA 1. [Sprzężenie od stanu z obserwatorem Luenberga]. Dany jest system dynamiczny SISO: ( ) ( ) ( ) ( ) ( ) t Cx t y t bu t Ax t x = + = & (a) Podać warunek realizowalności obserwatora. Warunkiem realizowalności obserwatora jest obserwowalność układu. Aby ją zweryfikować należy wyznaczyć macierz obserwowalności G. = −1 ... n CA CA C G , gdzie n to liczba zmiennych stanu. Aby układ był obserwowalny macierz G musi spełniać następujące zależności: • rankG = dimx = n , dla systemów MIMO • detG ≠ 0 , dla systemów SISO (b) Podać warunek konieczny swobodnego lokowania wartości własnych poprzez sprzężenie od stanu. Napisać postać analityczną sygnału sterującego realizującego sprzężenie od stanu. Warunkiem swobodnego kształtowania dynamiki liniowego układu dynamicznego jest jego sterowalność. Aby ją zweryfikować należy wyznaczyć macierz sterowalności R. [ ] b A Ab b R n 1 ... − , gdzie n to liczba zmiennych stanu. Aby układ był sterowalny macierz R musi spełniać następujące zależności: • rankR = dimx = n , dla systemów MIMO • detR ≠ 0 , dla systemów SISO Analityczna postać sygnału sterującego realizującego sprzężenia od stanu: Sprzężeniem od stanu nazywamy realizację sygnału sterującego wg następującej formuły: ( ) ( ) ξ + ± = t Kx t u , gdzie ξ jest nowym wejściem. Równanie układu zamkniętego: ( ) ( ) ( ) ξ b t x bK A t x + ± = & (c) Narysować schemat blokowy dla systemu ze sprzężeniem od stanu i obserwatorem. 2. [Sterowanie ze sprzężeniem od stanu i sprzężeniem wyprzedzającym]. Dany jest system dynamiczny SISO ( ) ( ) ( ) ( ) ( ) t Cx t y t bu t Ax t x = + = & przy czym zmienne stanu wybrano jako zmienne fazowe. (a) Zakładając dostępność pomiarową całego stanu x(t) podać ogólną postać sygnału sterującego za sprzężeniem od błędu śledzenia i sprzężeniem wyprzedzającym. Sprzężenie wyprzedzające zostało zaprojektowane przy pomocy modelu odniesienia: ( ) ( ) ( ) ( ) ( ) ( ) t x t x t e t bu t Ax t x d d d d − = + = & Po podstawieniu do powyższych równań równania stanu otrzymujemy następującą zależność:
... zobacz całą notatkę
Komentarze użytkowników (0)