Badanie przemieszczeń pionowych obiektu
Dane do zadania:
Temat:101
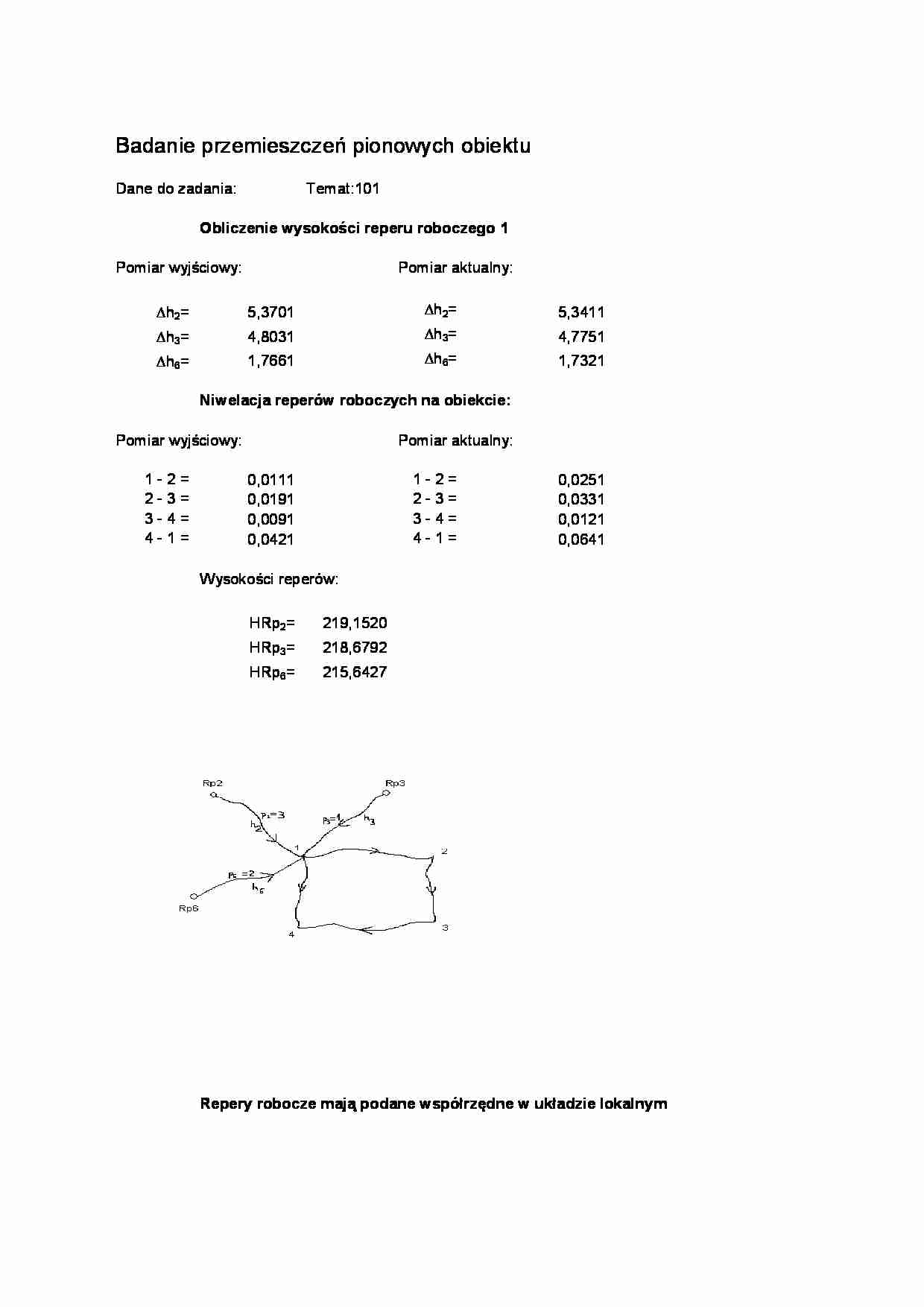
Obliczenie wysokości reperu roboczego 1
Pomiar wyjściowy:
Pomiar aktualny:
5,3701
h2=
5,3411
h3=
4,8031
h3=
4,7751
h6=
1,7661
h6=
1,7321
h2=
Niwelacja reperów roboczych na obiekcie:
Pomiar wyjściowy:
1-2=
2-3=
3-4=
4-1=
Pomiar aktualny:
1-2=
2-3=
3-4=
4-1=
0,0111
0,0191
0,0091
0,0421
0,0251
0,0331
0,0121
0,0641
Wysokości reperów:
HRp2=
219,1520
HRp3=
218,6792
HRp6=
215,6427
Repery robocze mają podane współrzędne w układzie lokalnym
X
26,00
1
2
4
3
10,50
13,00
23,00
Y
Repery robocze mają podane współrzędne w układzie lokalnym
Reper
1
2
3
4
X
26,00
26,00
10,50
10,50
Y
13,00
23,00
13,00
23,00
Obliczenie wysokości punktu 1
pomiar wyjściowy
pomiar aktualny
H1=
213,7819
H1=
213,8109
H1=
213,8761
H1=
213,9041
H1=
213,8766
H1=
213,9106
H1średnie=
213,8438
H1średnie=
213,8733
d1=
d2=
2
1,5
km
km
d3=
3,5
km
0,5
p=
0
0
0
0
0,666667
0
0
0,285714
pomiar wyjściowy
numer
dh
1
0,01180
213,8320
0,01980
213,8122
0,0007
0,0091
4
213,8438
0,0007
0,0191
3
H
0,0007
0,0111
2
dhwyr
0,00980
213,8024
-0,0007
0,0421
0,04140
1
Suma teor
suma prak
poprawki
213,8438
0,0000
-0,0028
-0,0007
pomiar aktualny
numer
dh
1
213,8733
0,0236
213,8497
0,0316
213,8182
-0,0016
0,0121
4
H
-0,0016
0,0331
3
dhwyr
-0,0016
0,0251
2
-0,0005
0,0106
213,8076
0,0016
0,0641
0,0657
1
suma teor
suma prak
poprawki
213,8733
0,0000
0,0062
0,0016
Obliczenie przemieszczenia reperów roboczych
Uz=Z1-Z0
Uz1=
Uz2=
0,0178
Uz3=
0,0060
Uz4=
Dla modelu Uo+xiwxz+yiwyz=Uzi
0,0295
0,0053
obliczam nieznane
parametry
Uo- pionowe przesunięcie obiektu
xz- nachylenie względem osi X
yz- nachylenie względem osi Y
v1=
1+
26,00
x1+
13
y1
0,0295
v2=
1+
26,00
x2+
23
y2
0,0178
v3=
1+
10,50
x3+
13
y3
0,0060
v4=
1+
10,50
x4+
23
y4
0,0053
T
Zapis macierzowy
1
1
1
1
A=
26,00
26,00
10,50
10,50
T
13
23
13
23
xz
V=A*X-L
L=
U0
X=
-1*
X=(A *P*A) A *P*L
p=
yz
1
26,00
13
1
26,00
23
1
10,50
13
4
73
72
73
1572,5
1314
(A *A) =
-0,0760
0,0042
0,0000
-0,1800
0,0000
0,0100
X=
0,00471
0,00116
-0,00062
0
0
0,666667
0
0
0,285714
72
1314
1396
4,8763
-0,0760
-0,1800
0,5
0
0
0,0295
0,0178
0,0060
0,0053
T
A=
T
A *A=
T
V=
-1
-0,0028
0,0028
0,0028
-0,0028
1
10,50
23
0,0267746
A*X= 0,0205246
0,0087746
0,0025246
T
A *L=
0,0586
1,3484
0,9923
kontrola
T
T
V *V=L *L*A*X
T
T
V *V=
0,000030
[VV]=
m0=
L *LL *A*X=
T
3,03E-05
0,0055
Uo=
0,000030
0,0047
xz=
0,0012
yz=
-0,0006
Obliczenie kąta największego nachylenia i jego azymut
max
max=
2
(xz) +(yz)
arctg
max
2
yz
xz
331,7111
max=
331
331
0
0,001319
0
0,00
0,00
... zobacz całą notatkę


Komentarze użytkowników (0)